7 The Basics of Three-Dimensional Vectors
Welcome to the world of three-dimensional vectors. Throughout the duration of these upcoming equations, I struggled to find an online calculator that could solve my queries. Due to the nature of my equation, it is just Pythagorean theorem with extra steps; therefore, assuming that all axis lengths are 1, and all applicable angles are [latex]{45}^\circ[/latex], the resultant of this singular vector should be [latex]\sqrt3[/latex], throughout my search, I found many calculators each giving me different answers. Therefore, I had to check my formulas with the table method[1]. However, to ensure that my formulas worked, I first replaces all axial values with [latex]1[/latex] giving me an answer of [latex]\sqrt3[/latex], and to ensure its validity, I replaced all axial values with [latex]2[/latex] providing me with an answer of [latex]\sqrt{12}[/latex], also written as [latex]2\sqrt3[/latex]. By doing this I have confirmed that my formula for three-dimensional linear vector addition works. A similar method was used to calculate the resultant angles, of which there are two, one for the [latex]x\ y[/latex] plane and one for the [latex]x\ y\ z[/latex] plane. As a means to ensure their validity within my system I used the same process but in reverse to end up with both angles as [latex]{45}^\circ[/latex], as initially that was the assumed angle in order to ascertain said final values.
These three-dimensional linear vectors follow exactly the same rules as their flatter cousins. The only difference being that their equations are inclusive to a third axis, meaning more calculations. They also include a secondary angle that must be considered whilst solving for the resultant. This angle is the lift, or the tilt. The angle allows movement upwards from the flat into the third dimension.
When applying these formulas to real world applications, it is important to acknowledge that the axis need not be directly north/south, east/west, and zenith/nadir, but relative to the major force. Weather that may be the direction of a car on a highway, or the force of a bat hitting a ball. So long as your other axis are perpendicular to each other and maintain my system[2], and the other vectors in the system follow the same chart, then the equations will work as intended.
Another thing to take note of is that the names of the axes can be changed. If you want to relabel the names of the axis on the plane, you can, so long as you change the corresponding name in the equations. The only reason there are names on the plane is for visual organization; and by doing so, allows connections to be made between the plane and the equations.
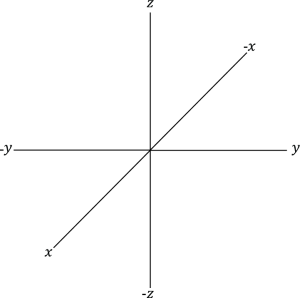
The way that positives and negatives work is amazingly simple, we take our basic cartesian plane previously discussed and we add another layer behind it. Everything in front of the origin is positive [latex]x[/latex], and everything behind it is respectively negative. As per the [latex]y[/latex] axis, everything right of the origin is positive [latex]y[/latex], everything to the left is negative [latex]y[/latex]. Everything above the origin is positive [latex]z[/latex], and of course everything below it is negative [latex]z[/latex]. As for counting the quadrants we follow the same counting pattern as a two-dimensional plane. We start with the front most half and count our standard four, and then we move on to the back half and we continue in the same pattern as before, starting from five all the way to eight.
